




















1. Introduktion till AC-frekvensomriktare (Variable Frequency Drives) Inom den moderna industriella styrningens rike...
LÄS MER
Hur väljer man rätt industriell servomotor för min applikation?
1. Definiera dina applikationsbehov
Först måste du ha en djup förståelse för ditt applikationsscenario. Ställ dig själv dessa frågor:
-
Rörelsetyp : Kräver din applikation kontinuerlig rotation, fram- och återgående rörelse eller exakt positionering? Detta kommer att avgöra kraven på hastighet, vridmoment och noggrannhet.
-
Lastegenskaper : Hur tung är lasten som ska köras? Är lasten tröghet eller konstant? Detta påverkar direkt det erforderliga vridmomentet.
-
Arbetscykel : Kommer motorn att fungera kontinuerligt eller intermittent? Hur länge varar accelerations-, konstanthastighets- och retardationsfaserna under en arbetscykel? Detta bestämmer kraven på motorns värmeavledning och överbelastningskapacitet.
-
Miljöförhållanden : I vilken typ av miljö kommer motorn att fungera? Finns det hög temperatur, hög luftfuktighet, damm eller frätande kemikalier? Dessa faktorer kommer att påverka motorns inträngningsskydd (IP) klassificering och materialval.
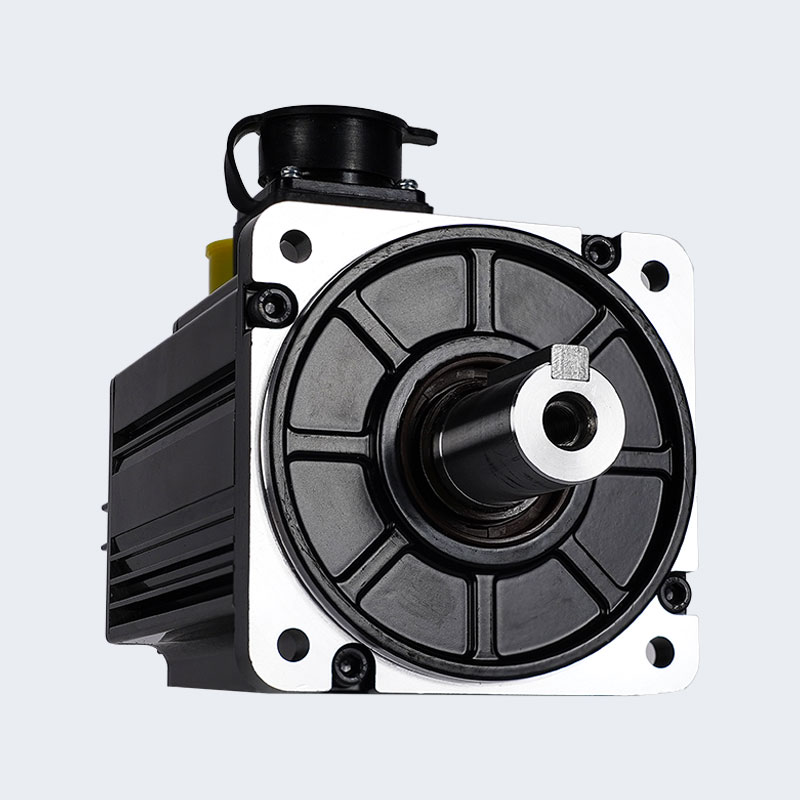
2. Grundläggande tekniska parameteröverväganden
Efter att ha fått en tydlig förståelse av din ansökan kan du börja utvärdera de tekniska parametrarna för servomotor .
a. Vridmoment
Vridmoment är den primära parametern vid val av servomotor. Den är indelad i tre typer:
-
Nominellt vridmoment : Det vridmoment som motorn kan mata ut kontinuerligt med sitt nominella varvtal. Detta är det vridmoment du behöver under normala driftsförhållanden.
-
Högsta vridmoment : Det maximala vridmoment som motorn kan avge under en kort tid under överbelastning. Detta är avgörande för att hantera uppstart, acceleration eller plötsliga förändringar i lasten. Se till att motorns maximala vridmoment uppfyller det maximala momentana vridmomentkravet för din applikation.
-
Hållande vridmoment : I vissa tillämpningar, till exempel de som kräver att motorn bibehåller sin position efter ett effektbortfall, är hållmomentet kritiskt.
Vridmomentberäkning: Noggrann vridmomentberäkning måste ta hänsyn till lasttröghet, friktion, gravitation och accelerations-/retardationsmoment. Du kan använda professionella mjukvaruverktyg eller formler för detta, och det rekommenderas i allmänhet att inkludera en säkerhetsmarginal på 20-30 %.
b. Hastighet
Hastigheten är också en kritisk faktor. Du behöver veta:
-
Nominell hastighet : Den hastighet med vilken motorn kan arbeta kontinuerligt och stabilt.
-
Maximal hastighet : Den högsta hastighet motorn kan uppnå. Se till att detta värde uppfyller din applikations krav, särskilt i scenarier som kräver ett snabbt svar.
c. Tröghetsmatchning
Tröghetsmatchning är en av de mest lättförbisedda, men ändå avgörande, aspekterna av att välja en servomotor .
-
Teoretiskt sett , är det optimala matchningsförhållandet typiskt 1:1.
-
Praktiskt taget , för stela anslutningar är det rekommenderade förhållandet vanligtvis mellan 3:1 och 5:1. För belastningar med hög tröghet kan detta förhållande vara något högre, men ett för högt förhållande (t.ex. över 10:1) kan göra systemet svårt att trimma, orsaka vibrationer eller till och med leda till instabilitet.
d. Återkopplingsenhet
Återkopplingsenheten är kärnan i ett servosystems exakta kontroll. Vanliga typer inkluderar:
-
Encoder : Ger information om position och hastighet. Högre upplösning leder till bättre positioneringsnoggrannhet. Incrementella och absoluta kodare har var och en sina för- och nackdelar; den förstnämnda är billigare men kräver återplacering efter ett strömavbrott, medan den senare inte gör det.
-
Upplösare : Presterar mer stabilt i tuffa miljöer (höga temperaturer, vibrationer) men har vanligtvis lägre upplösning än en kodare.
3. Systemintegration och kompatibilitet
Att välja en servomotor handlar inte bara om att välja själva motorn; det handlar också om att överväga dess kompatibilitet med hela styrsystemet.
-
Servo Drive : Se till att motorn och servodrivningen är kompatibla, helst från samma märke eller med certifierad kompatibilitet. Frekvensomriktaren måste ge tillräcklig ström och spänning för att driva motorn och stödja de erforderliga styrlägena (t.ex. läges-, hastighets- eller vridmomentstyrning).
-
Styrenhet : Kontrollera om servomotor och enheten kan kommunicera med din huvudstyrenhet (PLC, IPC, etc.). Vanliga kommunikationsprotokoll inkluderar EtherCAT, Profinet och CANopen.
-
IP-betyg : Välj lämplig IP-klassificering baserat på din arbetsmiljö. Till exempel används IP65 eller IP67 vanligtvis i dammiga eller våta miljöer.
Slutsats
Att välja rätt industri servomotor är en systematisk process som kräver en omfattande utvärdering av applikationsbehov, viktiga tekniska parametrar och kompatibilitet med hela styrsystemet. Vi rekommenderar att du samarbetar med professionella leverantörer eller ingenjörer för att använda deras expertis och tekniska support för noggranna beräkningar och urval, för att säkerställa att din automatiserade utrustning fungerar effektivt och stabilt.
Tidigare inlägg
Vilka är vanliga tillämpningar av industriella servomotorer?
Nästa inlägg
Vad är skillnaden mellan en servomotor och en stegmotor?
Upphovsrätt 2024 Fujian Raynen Technology Co.,Ltd. Alla rättigheter reserverade.
Sekretesspolicy  Motorkontrolltillverkare
Motorkontrolltillverkare