




















1. Introduktion till AC-frekvensomriktare (Variable Frequency Drives) Inom den moderna industriella styrningens rike...
LÄS MER
Hem / Nyheter / Branschnyheter / Electric Drive Explained: Hur det fungerar, typer och varför det är viktigt
Electric Drive Explained: Hur det fungerar, typer och varför det är viktigt
Vad är en elektrisk drivning och hur fungerar den?
En elektrisk drivning är ett system som använder elektrisk energi för att styra hastigheten, vridmomentet och riktningen för en motordriven mekanisk belastning. På sin mest grundläggande nivå består en elektrisk drivning av tre kärnelement: en kraftkälla, en kraftomvandlingsenhet (som en frekvensomriktare eller motorstyrenhet) och en elmotor som omvandlar elektrisk energi till mekanisk rörelse. Drivsystemet styr hur elektrisk energi levereras till motorn, vilket möjliggör exakt, effektiv och lyhörd kontroll över uteffekten – oavsett om den utmatningen är att vrida ett transportband, snurra ett pumphjul, accelerera ett fordon eller driva en robotarm.
Det som skiljer en modern elektrisk drivning från att helt enkelt ansluta en motor direkt till en strömkälla är intelligensen inbyggd i styrenheten. En direktansluten motoranslutning levererar omedelbart full spänning och frekvens, vilket ger motorn inget annat val än att arbeta med en fast hastighet utan möjlighet att modulera vridmoment eller anpassa sig till ändrade belastningsförhållanden. Ett elektriskt drivsystem infogar en programmerbar styrenhet mellan strömförsörjningen och motorn, vilket möjliggör kontinuerlig realtidsjustering av spänning, ström och frekvens baserat på återkopplingssignaler från sensorer som övervakar hastighet, belastning, temperatur och position. Denna styrbarhet är den avgörande fördelen med elektrisk drivteknik jämfört med mekaniska alternativ med fast hastighet.
Kärnkomponenter i ett elektriskt drivsystem
Att förstå vad ett elektriskt drivsystem består av är viktigt för alla som specificerar, sätter i drift eller underhåller ett. Även om specifika arkitekturer varierar beroende på applikation, delar de flesta elektriska drivsystem en gemensam uppsättning funktionella komponenter som arbetar tillsammans för att leverera kontrollerad mekanisk effekt.
Strömförsörjning och likriktarsteg
I AC-drivna elektriska drivsystem omvandlas den inkommande växelströmmen från nätet först till likström av en likriktarkrets. Detta DC-bussteg lagrar energi i kondensatorer och ger en stabil mellanspänning som frekvensomriktarens växelriktarsteg sedan kan modulera till den exakta utgångsvågform som motorn kräver. Kvaliteten på detta likriktarsteg påverkar direkt frekvensomriktarens harmoniska distorsionsegenskaper och dess kompatibilitet med elnätet. Högpresterande elektriska drivenheter innehåller aktiva front-end-likriktare som både reducerar övertoner som injiceras tillbaka i matningen och möjliggör regenerativ bromsning - matar energi tillbaka till nätet när motorn bromsar in.
Inverter och PWM-kontroll
Växelriktaren är hjärtat i den variabla hastigheten elektrisk drivning . Den tar DC-bussspänningen och använder en bank av switchande transistorer - typiskt isolerade gate bipolära transistorer (IGBT) - för att rekonstruera en variabel frekvens, variabel spänning AC-utgång genom en teknik som kallas pulsbreddsmodulering (PWM). Genom att snabbt slå på och av transistorerna tusentals gånger per sekund, syntetiserar frekvensomriktaren en jämn, kontrollerbar AC-vågform som motorn tolkar som en äkta sinusformad matning. Ändring av utfrekvensen ändrar motorhastigheten; Ändring av utspänningen i proportion till frekvensen bibehåller konstant motorflöde och vridmomentkapacitet över hastighetsområdet. Omkopplingsfrekvensen för PWM-omriktaren – typiskt mellan 2 kHz och 16 kHz – påverkar både det hörbara ljudet från motorn och omkopplingsförlusterna i själva frekvensomriktaren.
Motorkontrollprocessor och återkopplingsslinga
Mikroprocessorn eller DSP (digital signalprocessor) i en elektrisk drivenhet exekverar styralgoritmen som översätter ett börvärde för varvtal eller vridmoment till exakta växelriktaromkopplingskommandon. I enklare skalära (V/f) styrenheter bibehåller processorn ett fast spänning-till-frekvensförhållande och reagerar relativt långsamt på belastningsändringar. I mer sofistikerade vektorstyrnings- eller DTC-drifter (Direct Torque Control) beräknar processorn kontinuerligt den momentana positionen och storleken på motorns magnetiska flöde och vridmomentproducerande strömkomponenter, vilket möjliggör submillisekunderssvar på dynamiska lastförändringar. Återkoppling till processorn kommer från strömsensorer i frekvensomriktaren och valfritt från en extern givare eller resolver monterad på motoraxeln för exakt positions- och hastighetsmätning.
Elmotorn
Motorn är utgångsenheten för det elektriska drivsystemet, som omvandlar den kontrollerade elektriska energin från drivenheten till mekanisk axelrotation. Den vanligaste motortypen som används med elektriska drivningar med variabel hastighet är den trefasiga induktionsmotorn (även kallad asynkronmotor), som är robust, underhållssnål och tillgänglig i ett enormt utbud av effektklasser och ramstorlekar. Permanentmagnet synkronmotorer (PMSM) används i allt högre grad i både industriella och fordonsdrivna applikationer där hög effekttäthet, hög effektivitet över ett brett hastighetsområde och kompakt storlek är prioriterade. Switchade reluktansmotorer och synkronmotorer med lindade rotorer används i specialiserade applikationer med hög effekt eller tuffa miljöer.
Huvudtyper av elektriska drivsystem
Elektrisk drivteknik omfattar flera distinkta systemarkitekturer, var och en lämpad för olika prestandakrav, motortyper och applikationsmiljöer. Tabellen nedan sammanfattar de huvudsakliga typerna av elektriska drivenheter och deras nyckelegenskaper.
| Drivtyp | Motorkompatibilitet | Kontrollmetod | Typiska applikationer |
| Variable Frequency Drive (VFD) | AC-induktion, PMSM | V/f skalär, vektorkontroll | Pumpar, fläktar, transportörer, VVS |
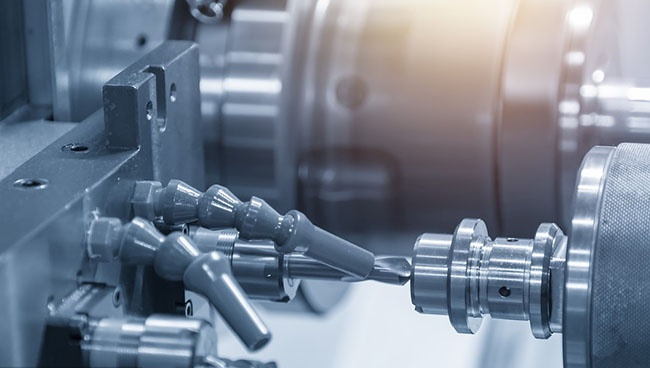
| Servo Drive | PMSM, borstlös DC | Vektor med sluten slinga, återkoppling av kodare | CNC-maskiner, robotteknik, förpackningar |
| DC-enhet | DC borstad motor | Tyristor/SCR faskontroll | Legacy industri, kranar, extruders |
| Stepper Drive | Stegmotor | Öppen slinga steg/riktning | 3D-skrivare, plottrar, liten positionering |
| Traction Drive (EV) | PMSM, induktionsmotor | Fältorienterad kontroll (FOC) | Elfordon, elcyklar, tåg |
| Regenerativ enhet | AC-induktion, PMSM | Aktiv frontände, fyrkvadrant | Hissar, testriggar, vindkraftverk |
Elektrisk drivning in Electric Vehicles: How Automotive Traction Works
Den elektriska drivenheten i ett batteridrivet fordon (BEV) är en av de mest prestandakritiska och tekniskt sofistikerade tillämpningarna av elektrisk drivteknik som finns idag. Ett elektriskt drivsystem för bilar måste leverera jämnt, omedelbart vridmoment från vila, bibehålla hög effekt under långa perioder, fungera effektivt över ett enormt hastighetsområde, överleva årtionden av vibrationer och temperaturcykler och passa inom extremt snäva förpackningsbegränsningar – allt samtidigt.
Hur en EV Traction Drive fungerar
I ett batteridrivet elfordon förser högspänningsbatteripaketet (vanligtvis 400V eller 800V) likström till traktionsväxelriktaren, som omvandlar den till trefas växelström med den frekvens och spänning som krävs för att producera det förarens beordrade vridmomentet. Traktionsomriktaren använder fältorienterad styrning (FOC) för att oberoende reglera de flödesproducerande och vridmomentproducerande strömkomponenterna i motorn, vilket möjliggör exakt vridmomentleverans även vid mycket låga hastigheter. Motorns utgående axel är ansluten till en enväxlad växellåda - elmotorer producerar användbart vridmoment över ett mycket brett hastighetsområde, vilket eliminerar behovet av en flerväxlad transmission - och därifrån till de drivna hjulen via en differential eller, i vissa arkitekturer, via individuella in-wheel-motorer.
Regenerativ bromsning i EV Electric Drives
En av de viktigaste energieffektivitetsfördelarna med elektriska drivsystem i fordon är regenerativ bromsning. När föraren lyfter av gaspedalen eller bromsar, beordrar drivenheten motorn att fungera som en generator, som omvandlar fordonets kinetiska energi tillbaka till elektrisk energi och matar tillbaka den till batteriet. Växelriktaren arbetar i omvänt energiflöde, där motorn nu producerar ett bromsmoment samtidigt som den fungerar som en elektrisk källa. I stadskörningscykler med frekvent acceleration och inbromsning kan regenerativ bromsning återvinna 15 % till 25 % av den totala energiförbrukningen, vilket avsevärt utökar räckvidden jämfört med vad som skulle uppnås med enbart friktionsbromsning.
Konfigurationer med enkel motor och dubbla motorer och fyrhjulsdrift
Elfordon på ingångsnivå använder vanligtvis en enda elektrisk drivenhet som driver antingen fram- eller bakaxeln. Dubbla motorkonfigurationer – med en drivenhet per axel – ger fyrhjulsdrift och tillåter fordonshanteringssystemet att oberoende kontrollera vridmomentet på varje axel för överlägsen dragkraft och dynamik. Vissa högpresterande elbilar använder tre eller till och med fyra individuella drivenheter, en per hjul, vilket möjliggör vridmomentvektoring med en grad av precision som inget mekaniskt differentialsystem kan matcha. Den oberoende styrbarheten för varje elektrisk drivenhet är en grundläggande fördel som elektrifierade drivlinor har jämfört med konventionella mekaniska system.
Industriella elektriska applikationer och energibesparingar
Industriella elektriska frekvensomriktare – främst frekvensomriktare som styr AC-induktionsmotorer – står för en betydande del av den globala industriella elförbrukningen. Enligt International Energy Agency förbrukar elmotorsystem ungefär 45 % av all el som genereras över hela världen, och majoriteten av den förbrukningen sker i industriella miljöer. Att ersätta direktanslutna motorstartare med fast hastighet med elektriska drivningar med variabel hastighet erbjuder några av de mest kostnadseffektiva energibesparingarna som finns i industriell verksamhet.
Affinitetslagarna: Varför hastighetskontroll sparar så mycket energi
För centrifugalbelastningar - pumpar, fläktar, kompressorer och fläktar - följer förhållandet mellan motorhastighet och effektförbrukning affinitetslagarna: effektförbrukningen är proportionell mot kuben av hastighetsförhållandet. Detta innebär att en sänkning av en pumpmotors varvtal från 100 % till 80 % av fullt varvtal minskar dess strömförbrukning till cirka 51 % av dess fullhastighetsvärde (0,8³ = 0,512). Att sänka hastigheten till 60 % minskar förbrukningen till bara 22 % av full hastighet. I pump- och HVAC-system där flödesbehovet varierar under dagen eller året, kan en ersättning av en motordrift med fast hastighet med en elektrisk drivning med variabel hastighet minska energiförbrukningen med 30 % till 60 % med återbetalningsperioder ofta under två år vid typiska industriella elpriser.
Mjukstart och minskad mekanisk stress
Utöver energibesparingar skyddar elektriska drivningar med variabel hastighet både motorn och det drivna mekaniska systemet genom att eliminera den höga startströmmen och stötmomentet som är förknippade med direktstart. När en motor startas direkt på nätet, drar den sex till tio gånger sin fulllastström under de första sekunderna och applicerar en impulsiv vridmomentspik på det mekaniska systemet. Med tiden belastar denna upprepade mekaniska chock kopplingar, växellådor, transportband, rörkopplingar och pumphjul. Att starta genom en elektrisk drivning – rampa upp hastigheten mjukt över en programmerbar accelerationsramp – minskar toppstartströmmen till 100 % till 150 % av fulllastströmmen och eliminerar vridmomenttoppen helt, vilket mätbart förlänger livslängden för hela drivlinan.

Viktiga specifikationer att förstå när du väljer en elektrisk drivning
Oavsett om du väljer en industriell drivning med variabel hastighet för en pumpapplikation eller utvärderar det elektriska drivsystemet i ett fordon, är följande specifikationer de viktigaste att förstå och matcha med dina applikationskrav.
- Effekt (kW eller hk): Frekvensomriktarens kontinuerliga uteffekt måste vara lika med eller överstiga fulllasteffektkravet för den motor som den ska styra. De flesta frekvensomriktare specificerar också en överbelastningskapacitet - såsom 150 % av märkströmmen i 60 sekunder - vilket måste vara tillräckligt för applikationens accelerationsvridmomentkrav.
- Ingångsspänning och frekvens: Frekvenser är designade för specifika inspänningsområden (t.ex. 200–240V enfas, 380–480V trefas, 690V trefas) och ingångsfrekvens (50 Hz eller 60 Hz). Att matcha frekvensomriktaren till den tillgängliga matningsspänningen är viktigt; de flesta moderna frekvensomriktare accepterar en spänningstolerans på ±10 % och rymmer både 50 Hz och 60 Hz matningsfrekvenser.
- Utgångsfrekvensområde: För tillämpningar med variabelt varvtal bestämmer frekvensomriktarens utfrekvensområde det motorvarvtalsområde den kan leverera. En typisk industriell VFD matar ut 0 Hz till 500 Hz eller högre, vilket ger ett hastighetsområde som är mycket bredare än något mekaniskt hastighetsjusteringssystem. Den lägsta reglerbara hastigheten utan att förlora vridmomentkapaciteten är lika viktig för applikationer som kräver stabil drift vid låg hastighet.
- Kontrollläge (V/f, vektor med öppen slinga, vektor med sluten slinga): V/f-skalär kontroll är tillräcklig för enkla centrifugalbelastningstillämpningar utan krav på precisionshastighet eller vridmoment. Vektorstyrning med öppen slinga (sensorlös vektor) ger förbättrat vridmoment vid låga hastigheter och dynamisk respons utan kodare. Vektorstyrning med sluten slinga med återkoppling av encoder ger högsta dynamiska prestanda och hastighetsnoggrannhet, nödvändig för positioneringsapplikationer och högtröghetsbelastningar som kräver snabb vridmomentrespons.
- Miljöskyddsklassning (IP-klassning): IP-klassificeringen (Ingress Protection) för frekvensomriktarhöljet anger dess motståndskraft mot damm och vatteninträngning. IP20-frekvensomriktare är lämpliga för rena, torra kontrollpaneler. IP54- eller IP55-frekvensomriktare används i dammiga eller stänkbenägna industrimiljöer. IP66 eller högre krävs för utomhusinstallationer eller tvättmiljöer inom livsmedelsförädling och liknande sektorer.
- Kommunikationsgränssnitt: Moderna elektriska drivsystem stöder en rad industriella kommunikationsprotokoll för integration med PLC:er och övervakande styrsystem. Vanliga gränssnitt inkluderar Modbus RTU/TCP, PROFIBUS, PROFINET, EtherNet/IP, CANopen och EtherCAT. Att välja en enhet med rätt protokoll för ditt automationssystem undviker dyr gateway-hårdvara och förenklar idrifttagning och diagnostik.
- Bromsförmåga: Tillämpningar med hög tröghetsbelastning eller frekventa retardationscykler – såsom centrifuger, hissar, kranar och testställ – kräver en frekvensomriktare med antingen en inbyggd bromstransistor och ett externt bromsmotstånd för dynamisk bromsning (avleder bromsenergi som värme) eller en aktiv regenerativ frontdrift som matar tillbaka bromsenergin för maximal effektivitet.
Elektrisk drivning vs. hydraulisk drivning vs. mekanisk drivning: En praktisk jämförelse
I många industriella och mobila utrustningstillämpningar konkurrerar elektriska drivsystem direkt med hydrauliska och mekaniska drivalternativ. Varje teknik har genuina styrkor och svagheter, och det rätta valet beror på applikationens specifika krav. Jämförelsen nedan belyser de viktigaste praktiska skillnaderna.
| Kriterier | Electric Drive | Hydraulisk drivning | Mekanisk drivning |
| Effektivitet | Hög (85–97 %) | Måttlig (60–80 %) | Hög (fast förhållande) |
| Hastighetskontrollerbarhet | Utmärkt (brett utbud) | Bra | Begränsad (fast eller stegvis) |
| Effekttäthet | Hög (PMSM) | Mycket hög | Måttlig |
| Underhåll | Låg | Hög (tätningar, vätska, filter) | Måttlig (lubrication, wear parts) |
| Renlighet | Rent, ingen vätskerisk | Läckage och brandrisk | Rent |
| Ljudnivå | Låg to moderate | Hög (pump, ventilljud) | Måttlig |
| Fjärrstyrbarhet | Utmärkt | Måttlig | Stackars |
Installera och driftsätta ett elektriskt drivsystem: Vad du ska göra rätt
Även det bästa elektriska drivsystemet kommer att underprestera eller misslyckas i förtid om det är felaktigt installerat eller driftsatt. Följande punkter täcker de mest kritiska installations- och installationsövervägandena för industriella elektriska drivenheter.
Värmehantering och ventilation
Elektriska drivenheter genererar värme under drift — främst från kopplingsförluster i växelriktarens IGBT och ledningsförluster i strömkretsen. De flesta frekvensomriktare är konstruerade för att fungera inom ett omgivningstemperaturområde på 0°C till 40°C (32°F till 104°F) vid full märkström. Över 40°C omgivningstemperatur måste frekvensomriktaren reduceras — drivs med reducerad utström — för att hålla de interna komponenternas temperaturer inom säkra gränser. Se till att frekvensomriktaren är monterad på en plats med tillräcklig luftcirkulation, det erforderliga utrymmet ovanför och under enheten för kylluftflöde enligt tillverkarens installationsmanual och att kontrollpanelen eller kapslingen har tillräcklig ventilation eller forcerad luftkylning för den totala värmeavledningen av alla installerade frekvensomriktare.
Motorkabellängd och EMC-filtrering
PWM-utgångsvågformen för en elektrisk drivenhet med variabel hastighet innehåller högfrekventa spänningskomponenter som kan orsaka problem vid långa kabeldragningar till motorn. Spänningsreflektionseffekter i långa motorkablar (typiskt definierad som överstigande 50 meter för frekvensomriktare utan utgångsreaktorer) kan orsaka toppspänningar vid motorterminalerna som är betydligt högre än frekvensomriktarens DC-bussspänning, vilket belastar motorlindningens isolering. För kabeldragningar som överskrider frekvensomriktartillverkarens angivna gräns utan begränsning, installera en utgångsreaktor (även kallad motordrossel) eller ett dV/dt-filter vid frekvensomriktarens utgång. Se dessutom till att motorkabeln är skärmad (skärmad) med skärmen bunden till jord vid både frekvensomriktaren och motoränden och att motorkabeln dras separat från signal- och styrkablar för att minimera elektromagnetisk störning (EMI).
Parameterinställning och motoridentifiering
Innan en elektrisk frekvensomriktare tas i drift för första gången, mata in motorns märkskyltdata – märkspänning, märkström, märkfrekvens, märkhastighet och motoreffektfaktor – i frekvensomriktarens parameteruppsättning. De flesta moderna frekvensomriktare inkluderar en automatisk motoridentifiering eller auto-tune-rutin som kör motorn genom en kontrollerad testsekvens och mäter de faktiska elektriska egenskaperna hos den anslutna motorn, vilket optimerar frekvensomriktarens interna kontrollparametrar för den specifika motorn. Att köra den automatiska inställningsrutinen innan systemet tas i bruk rekommenderas starkt, särskilt för vektorstyrning, eftersom det avsevärt förbättrar hastighetsregleringsnoggrannheten och dynamiskt vridmomentsvar jämfört med att förlita sig på uppskattade motorparametrar enbart från märkskylten.
Framtiden för elektrisk drivteknik
Tekniken för elektrisk drivning går snabbt framåt på flera fronter, driven av elektrifieringen av transporter, ökad automatisering inom industrin och den globala insatsen för att minska energiförbrukningen och koldioxidutsläppen. Flera nyckelutvecklingar formar nästa generation av elektriska drivsystem.
- Halvledare med stort bandgap (SiC och GaN): Krafttransistorer av kiselkarbid (SiC) och galliumnitrid (GaN) ersätter konventionella IGBT:er av kisel i högpresterande elektriska enheter. Dessa enheter med stort bandgap växlar snabbare, arbetar vid högre temperaturer och har lägre växlingsförluster än kisel, vilket möjliggör frekvensomriktare som är mindre, lättare, effektivare och kan ha högre växlingsfrekvenser. SiC-växelriktare är nu standard i premiumdrivsystem för elfordon och går snabbt in i industriella produkter.
- Integrerade motordrivna enheter: Att montera drivelektroniken direkt på eller inuti motorhuset – skapar en integrerad motordrivenhet – eliminerar den långa motorkabeldragningen, minskar EMI, förbättrar systemets effektivitet och förenklar installationen. Integrerade elektriska drivmotorer vinner dragkraft i pump- och fläktapplikationer, HVAC-system och hjälpsystem för elfordon.
- AI och prediktivt underhåll: Moderna elektriska enheter genererar en kontinuerlig ström av driftsdata – ström, spänning, hastighet, temperatur, vibrationer och felhistorik. Artificiell intelligens och maskininlärningsalgoritmer som tillämpas på dessa data kan upptäcka subtila förändringar i motor- eller belastningsbeteende som föregår fel i veckor eller månader, vilket möjliggör förutsägande underhållsinsatser som förhindrar oplanerade driftstopp. Molnanslutna enheter med inbyggd tillståndsövervakning blir allt vanligare i industriella automationsplattformar.
- Högspänningsarkitekturer i elbilar: Elektriska drivsystem för bilar går över från 400V till 800V batteriarkitekturer, vilket minskar strömmen som krävs för en given effektnivå, vilket möjliggör tunnare, lättare ledningsnät och möjliggör mycket snabbare DC-snabbladdning. Arkitekturen med 800V elektrisk drivning, banbrytande av Porsche och Hyundai/Kia, håller på att bli den nya standarden för elfordon med lång räckvidd och förväntas bli utbredd i alla EV-segment inom de närmaste åren.
- Grid-interactive och vehicle-to-grid (V2G) drivsystem: Dubbelriktade elektriska drivsystem som kan exportera ström från ett elbilsbatteri tillbaka till elnätet eller till en byggnads elektriska system går från demonstrationsprojekt till kommersiell driftsättning. V2G-kompatibla elektriska enheter låter elbilsbatterier fungera som distribuerade energilagringstillgångar, tillhandahålla nätstabilitetstjänster och gör det möjligt för elbilsägare att tjäna intäkter genom att sälja lagrad energi vid perioder med hög efterfrågan.
Tidigare inlägg
Frekvensenhet förklaras: Hur det fungerar och när du faktiskt behöver en
Nästa inlägg
Lågspänningsmjukstartare: hur det fungerar, när du ska använda det och hur du väljer rätt
Upphovsrätt 2024 Fujian Raynen Technology Co.,Ltd. Alla rättigheter reserverade.
Sekretesspolicy  Motorkontrolltillverkare
Motorkontrolltillverkare